반응형
Talker와 Listener의 두 가지 노드가 있습니다. Talker 노드는 문자열 메시지를 게시합니다. Listener 노드는 이를 구독합니다. 이 프로세스 예제에서 talker는 Hello World 메시지를 게시하고 Listener는 이를 구독하고 prints합니다.
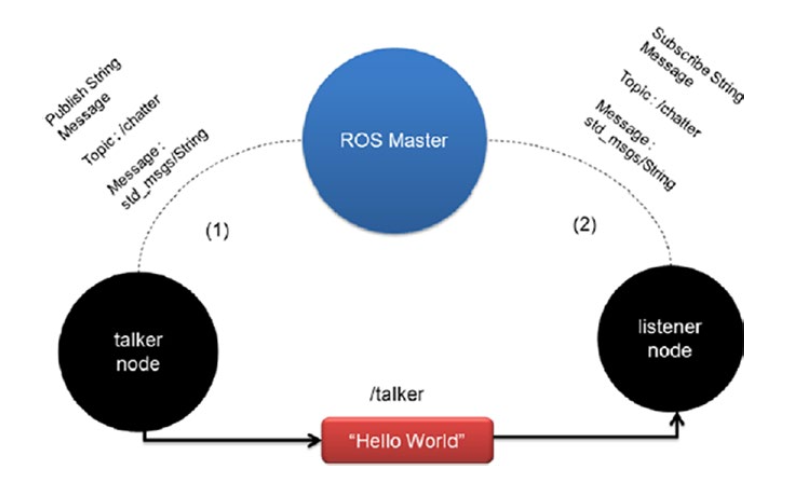
위 그림은 두 노드의 다이어그램을 보여줍니다. 앞에서 설명한 것처럼 두 노드는 다른 노드에서 정보를 가져오기 위해 ROS 마스터와 통신해야 합니다.
다음 명령을 사용하여 예제를 시작하겠습니다.
ROS에서 노드를 시작하는 첫 번째 단계는 roscore입니다.
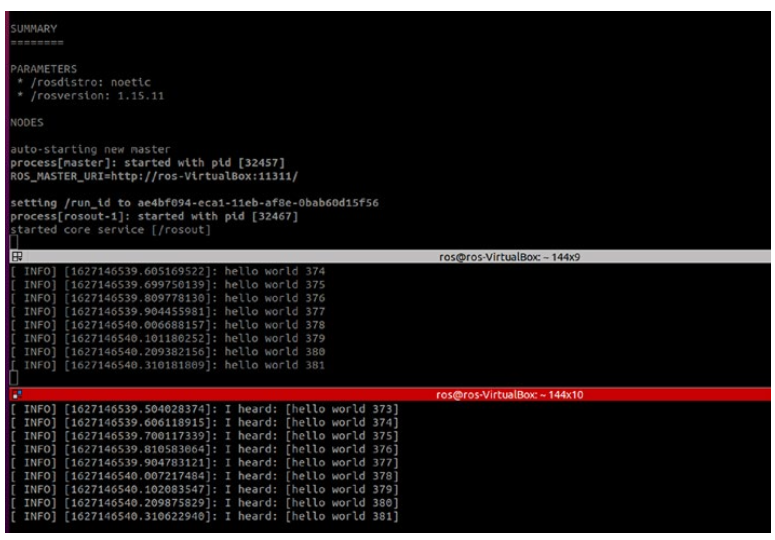
$ roscore다른 터미널에서 다음 명령을 사용하여 Talker 노드를 시작합니다.
$ rosrun roscpp_tutorials talker이제 터미널 화면에 메시지가 인쇄되는 것을 볼 수 있습니다. 다음 명령을 사용하여 주제를 나열하면 /chatter라는 새 주제가 표시됩니다.
$ rostopic list
출력: /채터이제 다음 명령을 사용하여 listener 노드를 시작합니다.
$ rosrun roscpp_tutorials listener두 노드 사이에서 subscribing이 시작됩니다.
두 개의 노드를 함께 실행하려면 roslaunch를 사용하십시오.
$ roslaunch roscpp_tutorials talker_listener.launch반응형




댓글